

如何解决如何估计2D图像中的三角形形状的3D方向和位置
这是我拍摄的原始图像:https://i.stack.imgur.com/MCp9B.jpg
我将图像设置为阈值:https://i.stack.imgur.com/hvSND.png
hsv_img = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
frame_threshed = cv2.inRange(hsv_img,lower_limit,upper_limit)
并搜索矩形:https://i.stack.imgur.com/1yJXq.png
#return a list of all the detected shapes in the image
contours,_ = cv2.findContours(thresholded_img,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
#list of all the detected rectangles:
detected_shapes = []
#for every detected shape
for cnt in contours :
approx = cv2.approxpolyDP(cnt,0.009 * cv2.arcLength(cnt,True),True)
#if the polygon have 4 sides and smaller then the image
if(len(approx) == sides_num) and (detected_shapes_img.shape[0]-1)
(detected_shapes_img.shape[1]-1)> cv2.contourArea(cnt):
detected_shapes.append(approx)
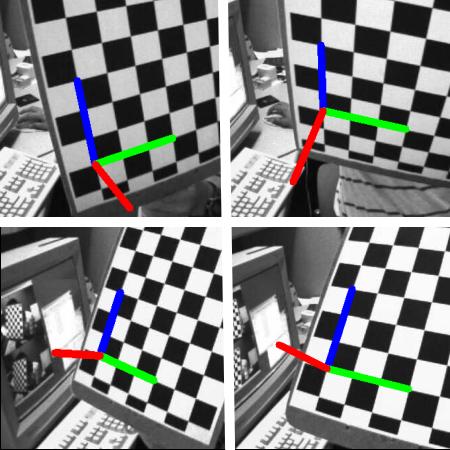
现在,我要提取相对于相机3D方向和位置的3D方向和位置。就像这个exempale中一样。只要记住我感兴趣的不是那个特定的图像。是要创建一个脚本,该脚本可以拍摄具有三角形形状的图像并估算形状的位置和方向。 我知道的唯一做到这一点的功能是cv2.solvePnP()。但是该功能需要相机矩阵和失真系数,而且我不知道如何获取此数据。因此,如果您知道我可以获取这些参数,或者有另一种解决方案,那么它将非常有帮助。
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 dio@foxmail.com 举报,一经查实,本站将立刻删除。

{kind=link}
{kind=link}
{kind=link}
{kind=link}