

StarsRobottools是针对Starrobot底层控制器设计的一款可视化工具,功能主要有下列几点:
- 硬件参数显示
- 小车参数读取显示和设置
- 外设功能使能设置
- 舵机测试
- 电机调试
- 电机数据显示
- 小车各轮子线速度和位移数据显示
- 线速度波形监控
- PID调节
- IMU数据显示
- 线速度校准、角速度校准
- 固件升级
- 串口发送(常规串口工具功能)
- 模拟设备回复(常规串口工具功能)
- CAN转发
- RS485转发(硬件串口3)
- RS232转发(硬件串口5)
- UART4转发(硬件串口2)
- BLE转发 (硬件串口2)
- 日志查看
- 通信接口配置
- ROS话题发布频率读取,设置
下面会逐个功能介绍。
- 硬件连接、驱动安装、固件下载
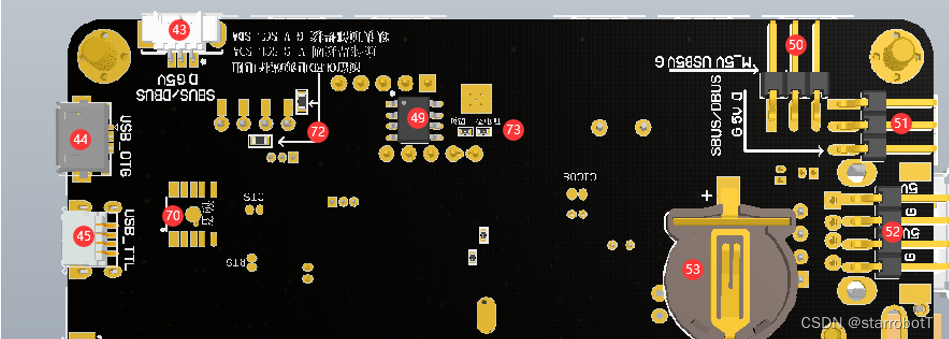
StarsRobottools与Starrobot底层控制器的连接是通过开发板底部的USB接口进行连接;即控制器底部的USB接口,如下图的(”44”)标号接口,具体板子接口定义参考Starrobot底层控制器使用教程文档。如果你没有安装STM32的虚拟串口驱动,可以在提供的工具包找到STM32 USB虚拟串口驱动.rar驱动包解压安装。给到的工具包里有对应的STM32固件,大家可以使用Jlink或者Stlink进行下载。

- 串口界面介绍与连接控制器
界面如下图所示

首先需要选择对应的端口,然后点击打开串口,打开串口后会自动发送读取参数指令,稍作等待后可以看到界面把控制器小车参数读取的数据,下面主要讲解上图所标的标号功能含义:
- 端口名称,选择对应底层控制器端口名称,一般是STMxxxx/ATxxx。
- 打开关闭端口
- 硬件和固件参数等写入,需要密码确认,无权操作
- 参数保存到本地,加载本地参数,参数读取,恢复默认参数,设备重启
- 小车的参数写入
- 电压、温度、超声波数据显示
- 勾选要使能的外设后点击外设设能保存按钮。
- 舵机测试需要先使能舵机外设后,拖动测试条,或者点击数据发送按钮,舵机才会有响应
- 参考上诉《8》
- 电机位置显示
- 电机位置显示
- 初次配置小车时,不确定编码器方向和电机转动方向时,电机电机调试让底层控制器进入电机调试模式(标号“21”电机调试按钮为绿色,不为绿色则电机该按钮),然后在标号“12”、“13”、“14”、“15”点击方向不正确的电机和编码器方向,设置完成后需要点击标号“21”方向保存按钮保存设定好的方向数据。
- 参考上诉《12》
- 参考上诉《12》
- 参考上诉《12》
- 电机调试数据显示,电机期望RPM、反馈PRM、PWM数据
- 参考上诉《16》
- 参考上诉《16》
- 参考上诉《16》
- 速度设置,设定角速度和线速度,控制器会根据车型解算出对应电机的PWM值,反馈回来的速度信息会在后面的文本框显示。
- 电机调试按钮,在电机调试模式下该按钮为绿色,不在调试模式下为黑色
- 电机转动方向和编码器方向保存按钮,在调试完方向后点击该按钮保存数据
- 自动上报是定时的上报线速度小车电机数据和电压等参数。
- 停止按钮,按下该按钮会发送停止指令给控制器
- 清空速度表数据
- 保存速度表为图片
- 摇杆控制,按下该按钮会弹出摇杆控制窗口,该摇杆控制窗口支持设定最大值,支持任意方向控制和固定方向控制,任意方向拖动中间红色小圆,固定方向点击对应方向的箭头,固定方向模式下可通过滑块改变速度。

28.速度反馈值显示
原文地址:https://www.jb51.cc/wenti/3280096.html
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 dio@foxmail.com 举报,一经查实,本站将立刻删除。

