

前言:最近在进行雷达实测数据的处理,是按块学的,包括:波形参数设置、ADC数据读取、2D-FFT处理、CFAR检测目标、测距测速测角,比较散,这篇笔记将前后处理串起来,形成一个体系。
一、波形参数设置
1、c %光速
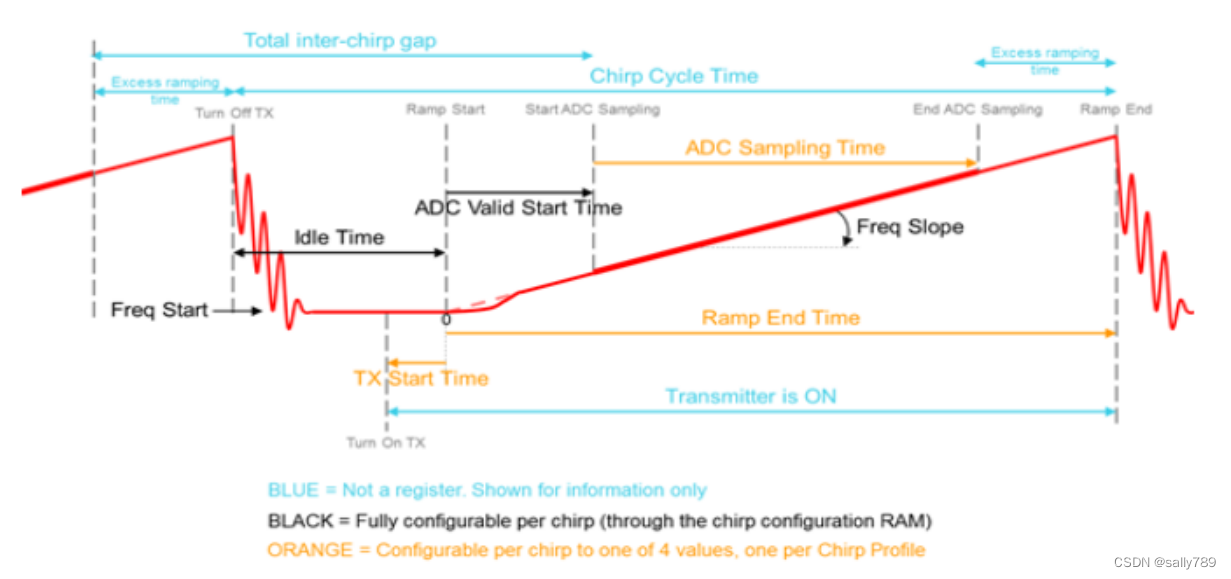
2、stratFreq %起始频率
3、一个chirp的周期Tc,由Ramp End Time和idle time组成。其中Ramp End Time包括在mmwavestudio里设置的adc start time(启动时间)以及通过设置采样点数以及采样频率计算出来的chirp从起始频率到最大带宽的时间;idle time(空闲时间)包括TX Start Time(是指发射天线发射信号的时间)
4、Frequency Slope %调频斜率
6、Sample Rate %采样率
7、Ramp End Time %从开始采样到采样结束时间
8、有效带宽B=ADC Samples*1/Sample Rate;(实际计算得时候用这个带宽)
9、n_chirps %chirp数
10、n_Frame %帧数
11、n_channel %通道数即虚拟天线的个数
二、ADC数据读取
读取ADC数据后将数据排列成[n_channel,ADC Samples,n_chirps,n_Frame]这样的4维矩阵
frameNum = floor(dataLen/sampleNumPerChirp/chirpnumPerFrame/channelNum); %帧的数量
dataLen = frameNum*channelNum*sampleNumPerChirP*chirpnumPerFrame;
data_re = reshape(data_tmp(1:dataLen),[sampleNumPerChirp,channelNum , chirpnumPerFrame, frameNum]);
data_re = permute(data_re,[2,1,3,4]);三、2D-FFT处理
对每一帧中每一个通道里的采样点和chirp进行FFT。首先是对采样点进行FFT;再将该结果在chirp维度上做FFT。具体可参考3D-FFT实测数据测角之数据预处理_sally789的博客-CSDN博客
三、CFAR
1、通道累加
简单理解就是将每个通道里做完2D-FFT后的值累加在一起。
2、CFAR检测
对做完通道累加后的数据进行CFAR检测,具体算法原理可参考恒虚警率(Constant False Alarm Rate)检测_sally789的博客-CSDN博客
四、测距、测速、测角
1、测距
由CFAR检测出幅值的峰值即为目标,峰值对应的距离维度上坐标乘上距离分辨率即得到目标距离
2、测速
由CFAR检测出幅值的峰值即为目标,峰值对应的多普勒维度上坐标乘上速度分辨率即得到目标速度
3、测角
测角原理可参考3D-FFT实测数据测距测速测角之算法处理_sally789的博客-CSDN博客不论是3D-FFT还是DBF做完以后的峰值对应的角度就是目标角
原文地址:https://www.jb51.cc/wenti/3281796.html
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 dio@foxmail.com 举报,一经查实,本站将立刻删除。

